Evaluation of Different Solutions for Measurement of the Thorax
Movement during Gait in Healthy Participants
MSc. Group Research Project 2 (Term 2, 2020)
MSc. Individual report (Inclusive Design and Human-machine Interfaces Module, Term 2, 2020)
Design of a Brain-Computer Interface based on EEG Signals
Wireless Voice Recognition Interface to Assist People with Tetraplegia to Control their Environment
MSc. Group Research Project 1 (Term 1, 2019)
Design and Development of a Wireless Remote Control based on Electromyogram (EMG) Sensors
MSc. Individual Lab Report (Term 1, 2019)
High-resolution Infra-red Camera
BSc. Thesis (ZHAW Institute for Computational Physics, 2015)
Bluetooth DAQ for Thermoelectrical Sensors
Internship (GreenTEG AG, Zurich, Sept. 2014 - March 2015)
Quadruped Walking Robot using Pouch Actuators
Visiting Student University of Tokyo (December 2014)
3D Magnetic Force Sensor for Medical Applications
BSc. Semester Project (ETH, Institute for Robotics and Intelligent Systems, 2014)
Electronic Elevator Display
R&D Engineer (ESESA, Mexico 2011)



Group project led by myself consisted of evaluating alternative solutions to measure the thorax movement during the gait cycle. A clinical trial with 10 healthy participants was done in the Gait Lab in collaboration with the Royal National Orthopaedic Hospital (RNOH) in Stanmore (London). The data was acquired with motion capture cameras while the subjects were walking on a treadmill. Four different configurations were compared to the gold standard. The thorax configurations were implemented in Visual 3D, and the data analysis was done in Matlab. Statistical methods such as RMSE, linear regression models, Almand-plots were used to asses the similarity of the solutions. Moreover, I came up with a methodology to asses the kinematics of the waveforms through the derivatives of the walking patterns.



Brain-Computer Interfaces (BCI) represent a potential solution for patients with severe motor disabilities to control their environment. In this work, EEG signals of different persons while open and closing their eyes were provided to design a simple BCI using two features. A Power Spectrum Density analysis was carried to select the most discriminant features. Consequently, a LinearDiscriminant Analysis was done to design the BCI. The resulting BCI reached a precision of 95% and a K-fold error of 2.6% for longer epochs. The present study demonstrated the feasibility to design simple BCIs using Linear DiscriminantAnalysis



50% of patients suffering from tetraplegia prefer to stay at home relying on family members or carers to help them complete their daily activities. Despite the efforts to develop control interfaces to simplify their life, it is still hard to find effective products capable to access more than one device at the same time. In this project, we suggest the use of a customizable voice recognition module (VRM) combined with a Bluetooth board to access the computer and potentially a wheelchair. The VRM can store up to 15 commands, which combined, significantly increases the number of devices that can be controlled. In this work, the VRM was characterized to understand how to train the device and find the limitations of the product. The tests showed that the VRM is user-dependent, reducing the likelihood of false positives, due to the noise from the environment or words said by someone else. It was also possible to connect to different computers (iOS, Windows) and perform daily tasks such as browsing the internet, opening an email and files, scroll pages up and down, etc.


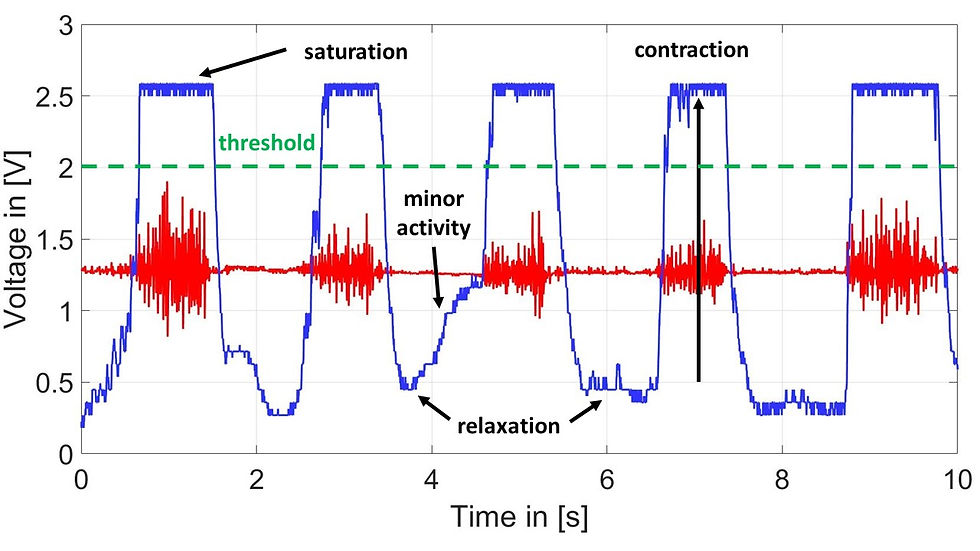
The focus to improve the life quality of patients with disabilities has grown over the previous years. As a result,
countless devices to control, interact and communicate with the environment have reached the market. An activity such as triggering an action can cause a significant impact on a patient. Thus, we propose a simple wireless remote control based on electromyogram (EMG) sensors. The device is capable to connect to a smartphone or computer via Bluetooth and perform simple actions like writing words or mouse clicks. The evaluation tests performed, showed a highly accurate device. The remote control does not react during resting position, it triggers single actions properly and allows them to perform different tasks such as carrying objects, texting or moving the arms without triggering the command.

Thermographic technology has a wide range of applications. A novel approach is presented in this project with the goal of developing a high-resolution infrared camera. The idea consists of combining an infrared camera with a visible light camera in order to combine both images producing a high-resolution image. The image processing algorithms were carried by a Raspberry Pi microcomputer. The entire software was written in Python. Methods such as edge detection linear interpolation and superposition allow this camera to behave like an infrared camera with qualities of a VIs-camera. The camera is capable of showing a preview in real-time and taking pictures in different resolutions. Thanks to the edge detection feature are possible to recognize objects appearing on the images. The camera has also the ability to take pictures of objects at room temperature.


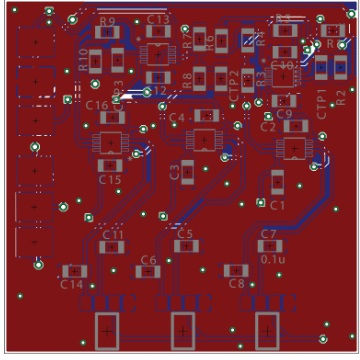
During my internship, I fabricated a programmable and portable data acquisition device capable of transmitting sensor (thermoelectric) readouts to an Android smartphone device. I increased the resolution by using a 14-bit ADC converter. The sensor information was then sent to a device using low energy Bluetooth. I did two iterations of the PCB reducing the sizes of the module. I also programmed the Android app.


Pouch actuators are gas-tight inflatable pouches fabricated by heat bonding. Depending on the design, the actuators can rotate or compress with controlled air. I learned to fabricate the devices and developed the first quadruped walking robot using this kind of actuators a series of linear actuators. The robot was controlled with Arduino, valves and vacuum pumps.

In this project, I present the fabrication of a 3D magnetic sensor using two HE244 Hall effect sensors. The chosen sensors do not have a signal processing circuitry, resulting in a small electronic component appropriate for our application. The dimensions of the sensors allowed us to assemble a considerably small device capable of measuring fields along the three-axis of space. For the external signal processing, a circuit using an implementation amplifier and an operation amplifier was proposed. The circuit proved to be highly accurate and reliable, adequate to measure displacements even down to 1um. The field was measured moving axially and diametrically magnetized magnets along the three-axis. Diametrically magnetized magnets resulted to be more redundant in order to identify the sort of movement performed
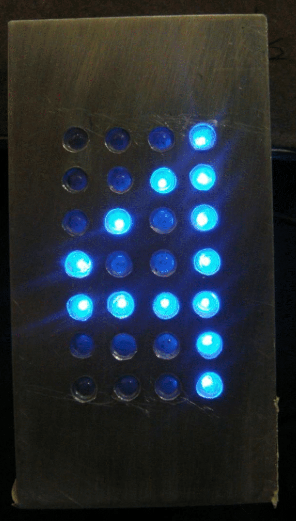
My first project before joining the school of engineering for my BSc. As an elevator technician, one of the electronic indicators was failing due to a false contact on the PCB. Therefore, I learned how to design and fabricate PCBs using ferric acid. I designed a matrix-like PCB to solder the LEDs, one matrix for each number. To this day, the display is still working with little maintenance
Group project led by myself consisted of evaluating alternative solutions to measure the thorax movement during the gait cycle. A clinical trial with 10 healthy participants was done in the Gait Lab in collaboration with the Royal National Orthopaedic Hospital (RNOH) in Stanmore (London). The data was acquired with motion capture cameras while the subjects were walking on a treadmill. Four different configurations were compared to the gold standard. The thorax configurations were implemented in Visual 3D, and the data analysis was done in Matlab. Statistical methods such as RMSE, linear regression models, Almand-plots were used to asses the similarity of the solutions. Moreover, I came up with a methodology to asses the kinematics of the waveforms through the derivatives of the walking patterns.